
 青少年在线精英教育平台
青少年在线精英教育平台

变形金刚汽车人与自动驾驶技术(16星期,32课时)
人工智能教育专家亲自授课
源于斯坦福的人工智能思维
自动驾驶的专业知识体系
1:1中英文双语特色课堂

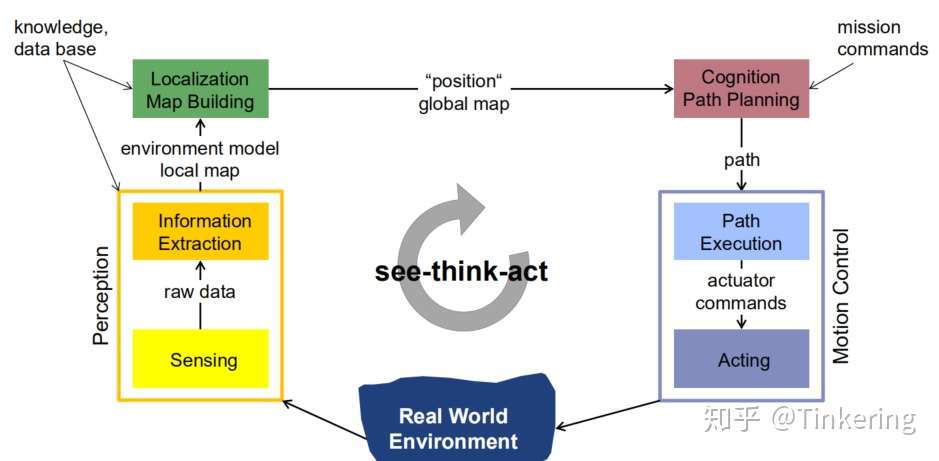
为了解决这三个问题,机器人需要具备感知环境的能力(Perception),自主建立环境模型(Mapping),从而获取自身在环境中的位姿信息(Localization),规划并控制机器人移动(Planning and Control)。
具体实现流程框架如下:
0 所有回答
- 还没有回答,赶快添加一个吧!
里兰教育最新课程 ● 中国首发

- 前所未有的“元宇宙”课堂
- 斯坦福专家亲自设计开发
- 元宇宙与3D建模相结合
- 前所未有的“元宇宙”课堂
- 斯坦福专家亲自设计开发
- 一站式科学家体验计划
WeChat & Official Accounts 微信&公众号

导师微信

里兰公众号