
 青少年在线精英教育平台
青少年在线精英教育平台

动态行走--人类和机器的行走方式。
在了解机器人的走路方式前,我们先要了解一种走路方式:动态行走。
动态行走和静态行走相对,静态行走是因为静态平衡,静态平衡就是物体在静止状态下也能保持平衡;动态行走则恰恰相反,只有在运动的情况下才能平衡。
下面是几个示例:
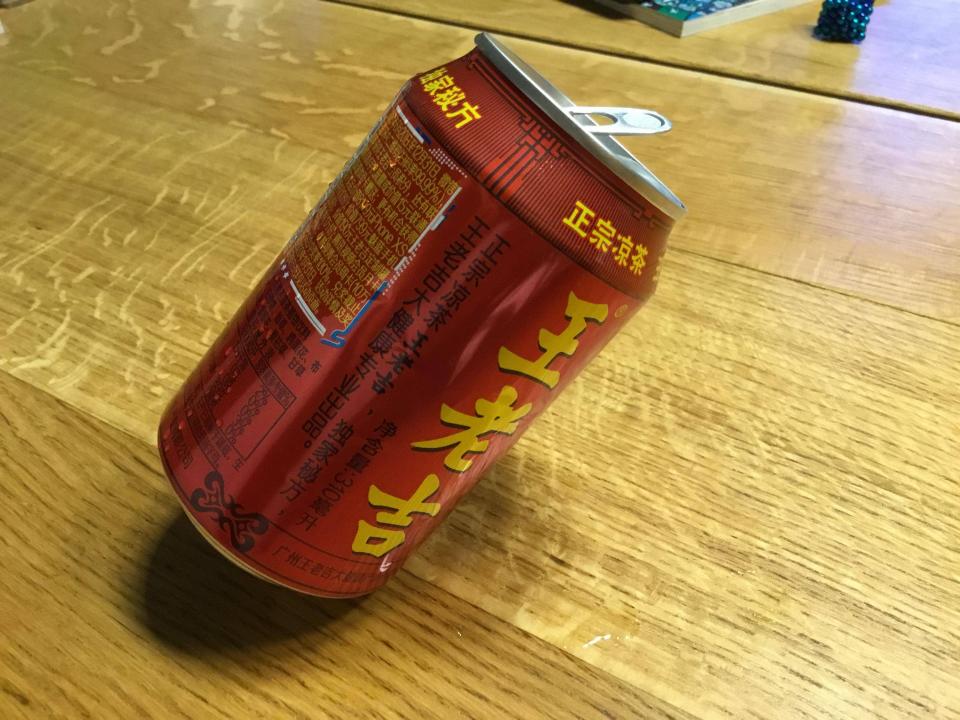
一,静态平衡:
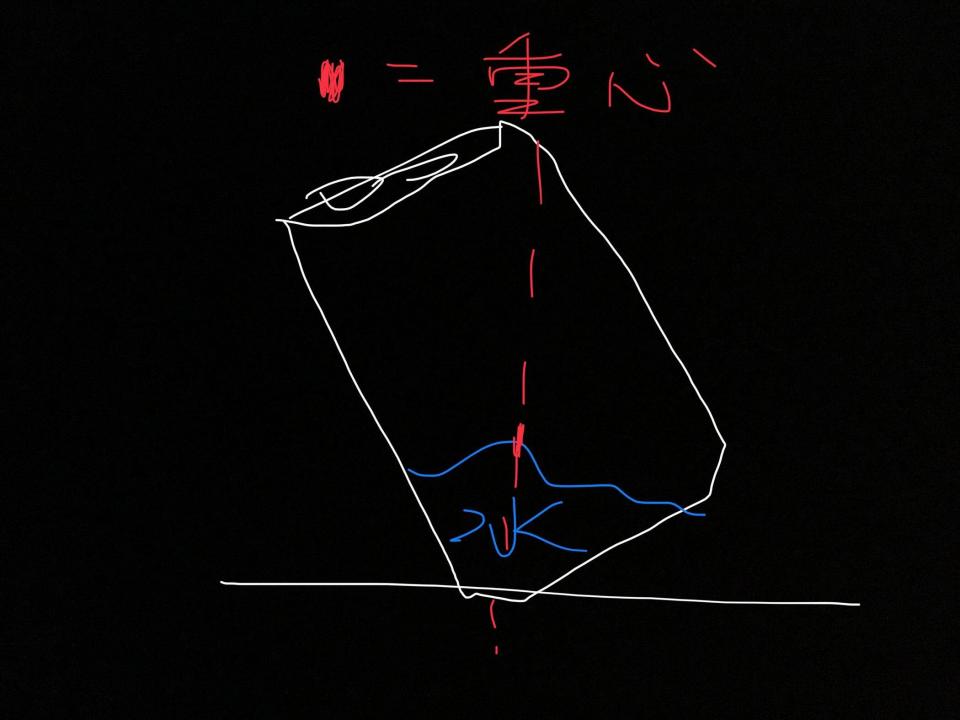
二,动态平衡:
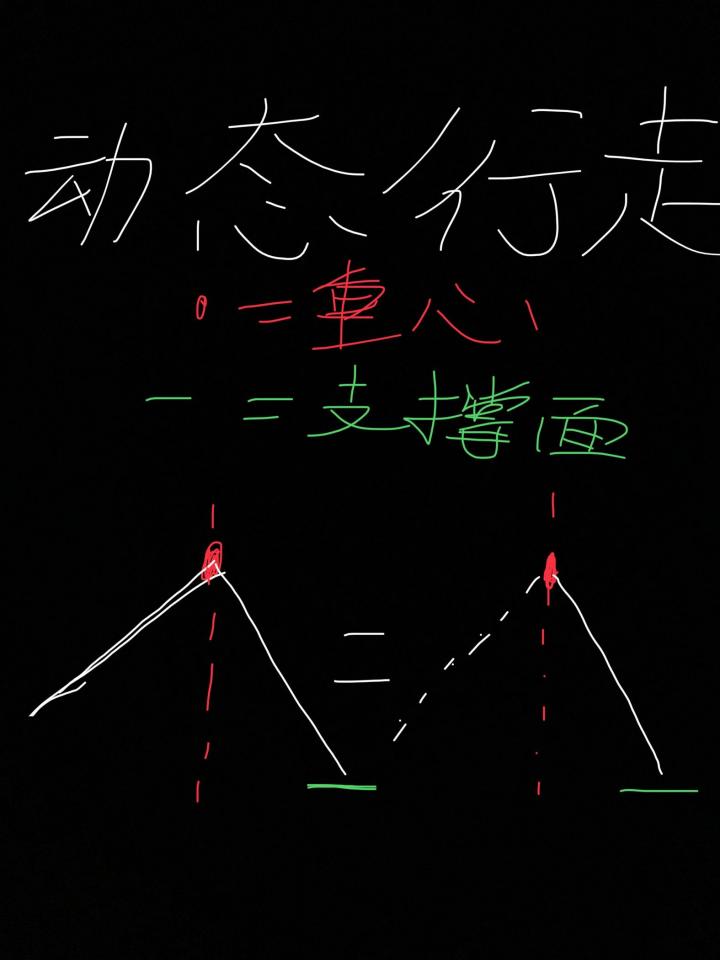
咦?上面那张图为什么这么奇怪?
其实没那么奇怪~
这只是用来讲动态平衡为什么要是动态的,不能是静态的。
在第一张(左)图里,是一个简易的人走路的形状。在第二张(右)图里,我们会发现那个人的后腿变成虚线了,这是因为第一张(左)图中,右腿是抬起来的,可以忽略不计。但抬起右腿后,重心就不在支撑面里了。如果继续站着不动,人就会倒,所以必须让后脚在前面支撑,这样就形成了动态行走。
下面是挑战任务:
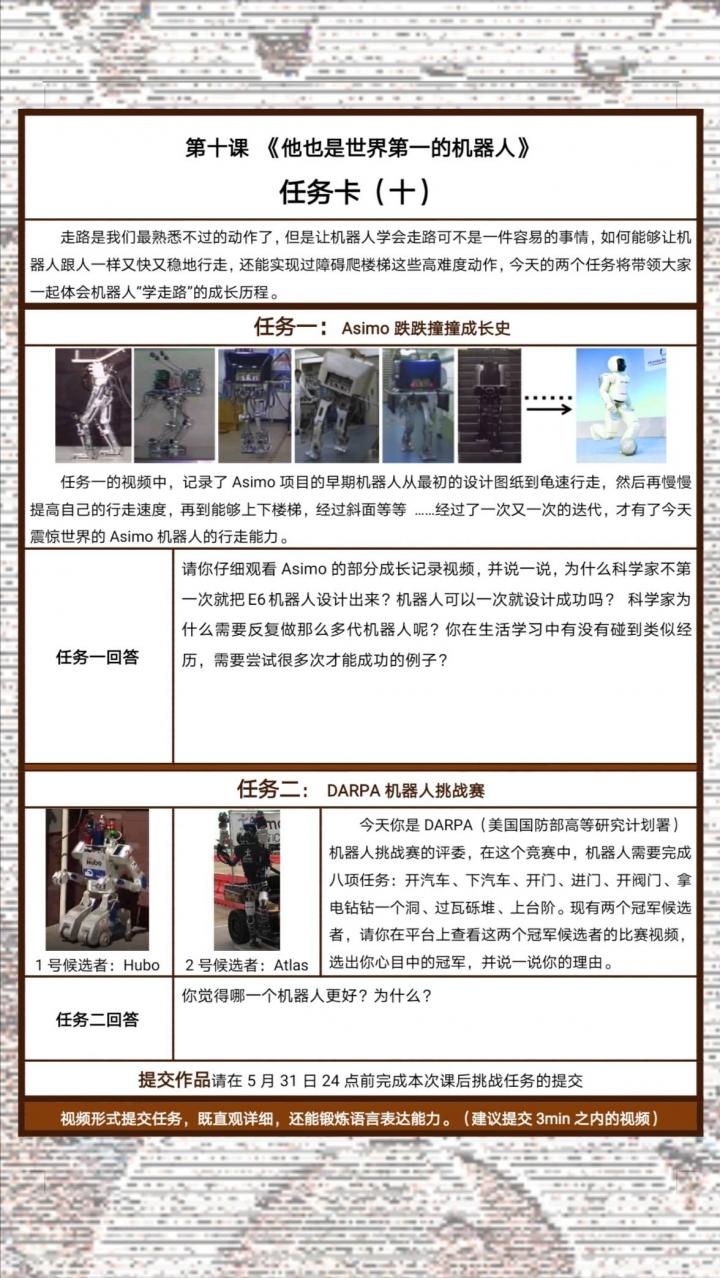
一,Asimo跌跌撞撞成长史
1,人们一定要不断尝试才能创造出好的机器人。
2,不能。
3,因为这样子可以改进错误。
4,有,例如跆拳道训练。
二,DARPA机器人挑战赛
1,Atlas。
2,因为它完全是用人的走路方式来走的,虽然中间摔倒了,但也很厉害了。
886,再见!
里兰教育最新课程 ● 中国首发

- 前所未有的“元宇宙”课堂
- 斯坦福专家亲自设计开发
- 元宇宙与3D建模相结合
- 前所未有的“元宇宙”课堂
- 斯坦福专家亲自设计开发
- 一站式科学家体验计划
WeChat & Official Accounts 微信&公众号

导师微信

里兰公众号