
 青少年在线精英教育平台
青少年在线精英教育平台






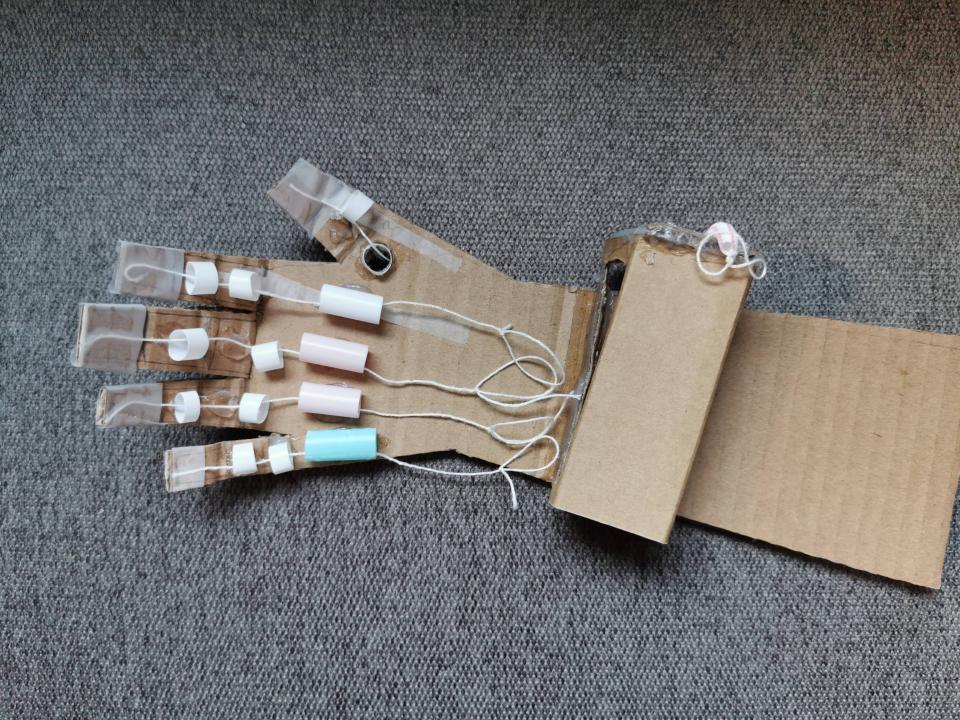
我们一共制作了三个纸质动力外骨骼,在制作过程中发现了以下问题:
1、手型纸壳需要略大于自己的手掌,这样在最后连接操作时手指活动更灵活
2、我们用了两种线,强韧的风筝线和柔软的棉线。
风筝线优点是比较光滑容易拽动,但缺点是打结后容易散开,操作几次后需要重新打结
棉线优点是打结牢固,但自身阻力太大不容易拽动手指关节,操作几次之后吸管也因为太大的摩擦力脱落了。
3、大拇指不太容易拽动,整个机器人手臂拿取物品时不紧,容易让物品滑落。
我会和爸爸妈妈再多做几次尝试,希望机器人手臂可以做到像视频里一样棒。
附件: 齐楚寒制作纸质机器人外骨骼.mp4
里兰教育最新课程 ● 中国首发

- 人工智能教育专家亲自授课
- 源于斯坦福的人工智能思维
- 人工智能和机器人专业知识
- 人工智能教育专家亲自授课
- 源于斯坦福的人工智能思维
- 人工智能和机器人专业知识
WeChat & Official Accounts 微信&公众号

导师微信

里兰公众号